横排-无底-140x48mm-04-1.png "前沿科技阵地")
竖排-无底白字-280x96mm-04.png "前沿科技阵地")

要营造良好的VR沉浸氛围效果,显然需要一套既灵活,又准确的定位方案。如果定位失败,很可能对VR体验带来极大的负面影响。尤其对线下VR体验馆来说,老板们绝对不希望带给用户的是不愿再次光顾的糟糕体验。
实际上对于游戏者来说,定位不够精确,足以让他们对VR体验嗤之以鼻。比如偏离20cm的子弹可能根本无法对游戏中的对手造成有效伤害,谈何VR竞技?

到目前为止,我们已经见识过Vive使用的激光精确定位技术。但这仅仅针对单一玩家,对体验馆这种大空间、多用户应用来说,目前科技能力水平下,又有哪些方案能够带给用户足够优秀的使用体验?
更重要的是,体验店老板们还希望它在灵活、准确基础上,兼顾廉价属性。有这样的方案吗?
坦白说,世事难有十全十美,我们接下来将为你一一讲解目前可用于VR空间捕捉定位的技术,以及其存在的优劣。至于你更喜欢谁,愿意体验那种方案、愿意为那种体验掏腰包,那就真是萝卜青菜各有所爱的事情了……
体感摄像头
去年,在新宿街头进行了一场过雪山吊桥的VR体验,而通过该项目获得的奖励将是一杯热气腾腾的饮品。在该视频中不难发现微软的Kinect2体感设备。它采用TOF(飞行时间)计算的方法,通过探测光脉冲在飞行(往返)过程中的时间来计算距离。甚至还可以进一步得到物体的点云数据,甚至是角色的骨骼信息。

值得一提的是,Kinect2体感摄像头是微软发售的家用游戏机XBox One的可选外设。玩家可以很方便地通过网上渠道获取该价格较为低廉的设备。
不过,低廉的价格也就意味着产品可能存在较大的缺陷,而这缺陷显然另玩家头疼。由于30帧/秒的刷新率,玩家在游戏过程中会感受到明显地定位效果的延迟。另外由于Kinnect的视场角仅有60度,最大识别范围只有3-4米,这也就意味着最多可以6个人同时玩游戏。除了人数之外还有其他限制,如果6个人拥作一团的话,你可能直接从游戏世界中消失了,将没有“怪兽”、“敌人”向你涌来。
PS MOVE
同样是在去年早些时候,全世界第一家虚拟现实游戏体验中心Zero Latency正式对外开放。对于游戏玩家来说,这当然不容错过。在这个占地400平方米的体验中心,你可以随意行走,你可以与你的5个朋友共同玩游戏。

在这个巨大的体验馆内,作为玩家的你随处可见PS Eye摄像头。而你本身也像一棵张灯结彩的树在行动。然而这并不怪异,这些均是为了实现定位的PS Move设备。
依靠你身上不同颜色的光球,PS Eye 能够呈现出不同于背景图像的画面,这方便了计算机将其进行提取。观察并计算你在多个摄像头下的画面,能够完美获得你所处位置,并为之适配相应游戏画面。
它的缺陷在于同样颜色的光球分配给了多人,容易造成误报信息的情况。另外过于复杂的环境,可能会遮挡你身上的光球,从而造成定位的错误。PS Move需要解决两个问题以为你提供更好的定位,一是如何区分不同的光球,一是如何推算玩家的位置和姿态。
光学定位系统
对于第一个问题,PS Move颜色标记是合理的。但是如果玩家身处五颜六色的复杂环境,这就无法生效了。在这一背景下,采用红外摄像头的替代方案出现了。
采用大于100Hz的专用摄像头,以及全局快门,能够让你在高速运动过程中依然避免模糊的画面出现。同时,玩家佩戴的标记点也可以采用高反射率的材料,在摄像头周围添加红外LED进行补光。你在运动过程中将被完整且迅速的记录下来。便于为你提供实时的游戏画面。
对于玩家身份的ID区分,可以通过调整反射率的方式,或者采用在不同的组合方式来获得你的唯一身份。玩家将不再需要担心在此过程中被系统将A误认为B了。

由于事先安装摄像头,搭建者逐一记录摄像头观察的画面,每台摄像机的位置都预先标定了。唯一的问题是搭建者需要确认摄像头的位置不发生偏移,不然会导致玩家的定位失败,影响游戏效果。由于相当的准确性,以及较少的延迟,目前大多数VR体验馆均采用这样的方式。
这样的方案会存在一个较为明显地问题:高昂的成本。对于玩家来说,需要担心的仅仅是不要靠得太近,比如背靠背作战,这会导致误测的发生。
激光雷达
激光在测量上的精确度可以高达毫米。如果能采用激光进行空间定位,玩家无疑会获得一流的VR游戏体验效果。激光雷达接收器通过准确地测量光脉冲从发射到被反射回的传播时间,即TOF(Time of Flight),来进行距离的测量。
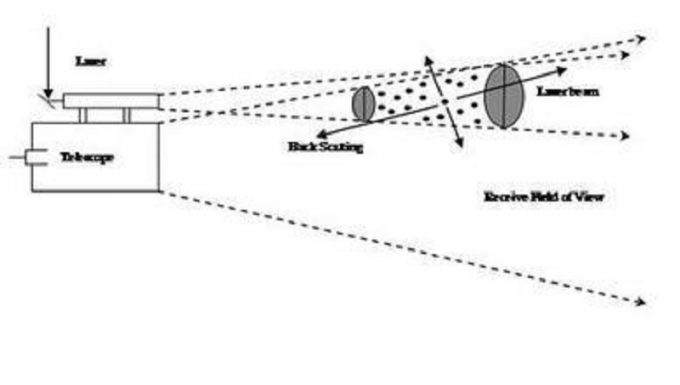
二维的激光雷达能够在几十米的扇形面内进行测量。当该区域存在玩家时,激光雷达能够精准的实现定位。对于VR中的位置探测,几十Hz的扫描频率便已经足够。
用激光雷达扫描存在的缺陷是:一、工作要求严苛,需防水防尘等;二、价格高昂;三、激光雷达定位发出的是扇形光,当有玩家阻挡在前面时,该玩家背后的“阴影区”就无法探测。另外,它也只适用于测距,无法识别玩家ID。所以它较适合单人游戏,而不适合群体。你将不能与你的朋友一起在该环境下进行共同游戏。
HTC Vive:Light House
HTC Vive一经发售,便令人瞩目。
头盔和手柄外,还有用作定位的Light House。
玩家需要预先将Light House布置到一个空屋子的两个角落中,这两个Light House相当于两个固定的激光发射基站,如下图所示。
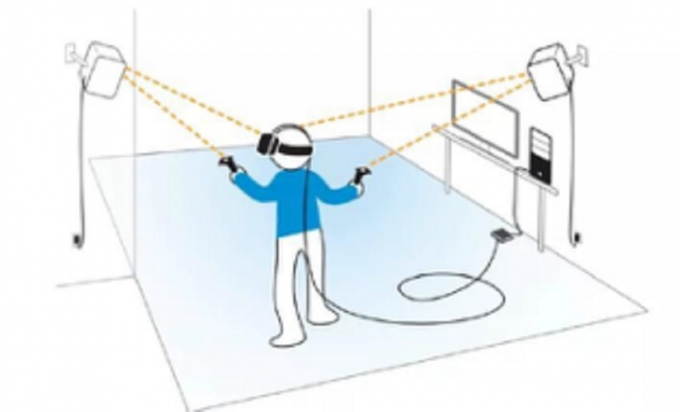
在HTC Vive手柄和头盔上都有固定位置安装的光敏传感器。其定位主要基于其内置的光敏传感器测量出X轴激光和Y轴激光分别到达传感器的时间,通过其到达时间的先后以及原本就固定于头显和手柄上的传感器进行定位。玩家在使用过程中要注意保护好头显等设备,否则会出现无法定位等问题。
而其最大的优势无疑在于不需要成像,它避免了大幅的计算,也使得玩家能够获得更高地游戏性能以及稳定性。同时,自行计算的嵌入式系统,也使得玩家较少的感到画面的延时。
缺陷仅仅在于,考虑到对玩家身体的保护,目前其只能覆盖5M*5M的范围。而且在这个范围内也不允许障碍物的出现,否则玩家会因为无法接收信号而导致无法获得游戏体验。由于是穿戴式设备,它的捕捉对象也仅仅是头部与手部部分。
RTKGPS
实时差分GPS主要通过基站与用户观测站观测数据进行相对实时定位,而其动态定位精度可以达到1cm-2cm。RTKGPS的出现大大发展了许多新的应用场景,例如无人机。RTKGPS原本属于专业领域,使用者寥寥且售价也非常高。但是随着技术发展,它越来越倾向于普及,例如下图这块开源RTKGPS套件:
但是与通常的GPS相同,它仅仅局限于室外使用。而想通过该技术进行定位的玩家无疑会大失所望。但是也不是毫无例外,室外的极重度VR体验已有先例。
像该视频展示的一样,玩家完全可以在虚拟空间中体会漂移的乐趣。而让这个冒险成功的原因,无疑是采用了RTKGPS定位技术。
UWB
玩家为了体验更好地游戏效果,不防像工程师一样打开脑洞。这些技术并没有穷尽,无线技术UWB技术便是其中一种。由于无线电是基于光速传播的,它再一次利用了飞行时间这一计算概念,通过U信标发出的脉冲到达基站的飞行时间来解算位置。其也有着傲人的定位精确度。
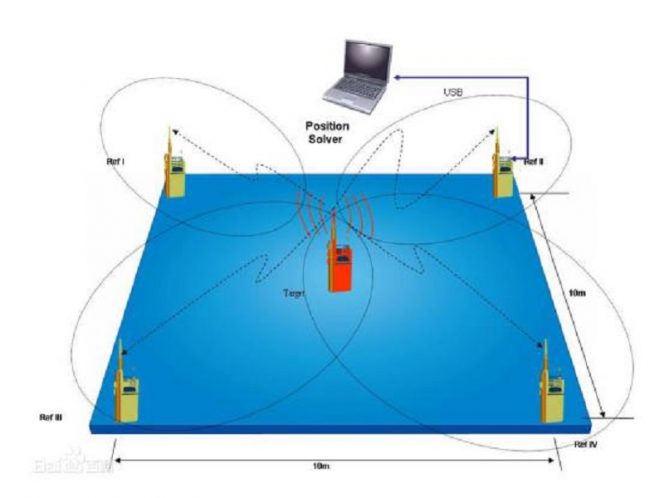
由于UWB技术的超大带宽,所以它拥有良好的穿透性。现目前成熟的UWB定位方案系统可以定位到几十厘米。在室内环境下,由于各种通信设备的干扰等,无法达到此前商家宣称的定位精度在2-5厘米。玩家为了更好的游戏效果,可能需要尽可能避免使用自带的通信设备。
而其覆盖范围大概为10米左右,如果是大型VR体验场所的话,可能需要铺设大量的通讯基站。目前的缺陷是仅采用该方案,玩家可能无法获得重度VR体验所要求的精度和定位距离。在这方面,有待与其他数据融合进行改善。
SLAM
SLAM,即Simultaneous Localization and Mapping,是即时定位与地图构建。
正如电影《普罗米修斯》中一般,当你完全处于一个未知的环境中,你可以抛出一个具有激光探测信息能力的无人机(球),它能够自主获取空间信息,再为己所用。这便是典型的SLAM应用场景。

在现目前的VR应用中,使用者急切需要的是人自己携带便利的计算设备,通过SLAM在未知的环境中为自己创造地图并进行定位。
SLAM算法的数据源是多种多样的:可以通过激光雷达扫描,或者直接使用Kinect这样的体感器(可见光+深度)方案等等。现目前各大AR软件和算法开发者一直在努力实现应用其的目标。
由于SLAM在给出精准的空间位置时,还能进行三维重建等,这在一定程度上解决了显示设备里实际场景与虚拟场景相互遮挡的问题。这样玩家在游戏过程中不再需要考虑视野的受限等问题。而在未来,这种AR场景也将得到广泛应用。微软的HoloLens便是采用的典型的RGBD SLAM方案。
当然SLAM技术也存在自身的缺陷。基于视觉识别,其存在不可避免地延时情况。另外,它存在极大的计算压力。而HoloLens为此增加了一块或者多块协处理器。玩家在使用过程中将明显感觉到设备发烫、过热等问题。它是否能成为未来VR世界主流定位方式,目前还是个未知数。
零镜观点
就目前市面上存在的定位技术而言, 几乎没有任何一个方案同时兼顾了成本、多人游戏、低延迟、抗干扰的能力。也就意味着玩家目前还没有机会参与一场顶级的VR体验。这不得不延伸出另一些问题,是否在VR虚拟空间中进行行走,将是一个难以突破的瓶颈?如果不能体验这种自由,虚拟世界带给我们的自由体验是否会变成一种受限?这都是需要玩家去深深挖掘的内容。










